Data-Communication
Question 1 |
If the period of a signal is 100 ms. Then its frequency in Hertz is___
10 | |
100 | |
1000 | |
10000 |
Question 1 Explanation:
Given data,
Frequency = 1/Period.
Frequency = 1/100 x 10-3 Hz
= 10 Hz
Frequency = 1/Period.
Frequency = 1/100 x 10-3 Hz
= 10 Hz
Question 2 |
In MOSFET fabrication, the channel length is delayed during the process of
Isolation oxide growth | |
Channel stop implantation | |
Ply-Silicon gate patterning | |
Lithography step leading to the contact pad |
Question 2 Explanation:
In MOSFET fabrication channel length is defined during Poly-Silicon gate patterning process
Question 3 |
The open loop transfer function of a feedback control system is G(s).H(s)=1/(S+1) 3 . The gain margin of the system is
2 | |
4 | |
8 | |
16 |
Question 3 Explanation:
The open loop transfer function of a feedback control system is G(s).H(s)=1/(S+1) 3
Gain margin=?
→ Here, the formula is -3tan -1 (W pc ) = -180 0 tan -1 (W pc ) = -180 0 /3
= -60 0
W pc =√3 rad/sec
G(s).H(s)=1/(S+1) 3
|G(s).H(s)|=X= 1/(1+W pc 2 )
=1⁄8
G(s).H(s)=1/X
= 8
Gain margin=?
→ Here, the formula is -3tan -1 (W pc ) = -180 0 tan -1 (W pc ) = -180 0 /3
= -60 0
W pc =√3 rad/sec
G(s).H(s)=1/(S+1) 3
|G(s).H(s)|=X= 1/(1+W pc 2 )
=1⁄8
G(s).H(s)=1/X
= 8
Question 4 |
The final value theorem is used to find the
Steady state value of the system output | |
Initial value of the system output | |
Transient behaviour of the system output | |
None of these |
Question 4 Explanation:
The final value theorem is used to find the steady state value of the system output
Question 5 |
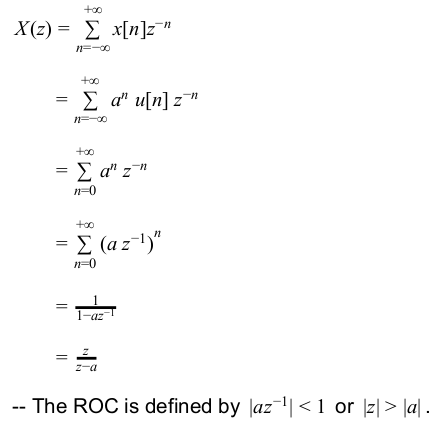
For the discrete signal x[n]=a n u[n], a>0 the z-transform is
(z+a)/z | |
(z-z)/z | |
z/(z-a) | |
z/(z+a) |
Question 5 Explanation:
Let x[n] be causal signal given by x[n] = a n u[n]
→ The Z-Transform of x[n] is given by
Region of Convergence(RoC)
Region of Convergence for a discrete time signal x[n] is dened as a continuous region in z plane where the Z-Transform converges. In order to determine RoC, it is convenient to represent the Z-Transform as a is rational X(z)=P(z)/Q(z)
1. The roots of the equation P(z) = 0 correspond to the ’zeros’ of X(z)
2. The roots of the equation Q(z) = 0 correspond to the ’poles’ of X(z)
3. The RoC of the Z-transform depends on the convergence of the polynomials P(z) and Q(z).
→ The Z-Transform of x[n] is given by
Region of Convergence(RoC)
Region of Convergence for a discrete time signal x[n] is dened as a continuous region in z plane where the Z-Transform converges. In order to determine RoC, it is convenient to represent the Z-Transform as a is rational X(z)=P(z)/Q(z)
1. The roots of the equation P(z) = 0 correspond to the ’zeros’ of X(z)
2. The roots of the equation Q(z) = 0 correspond to the ’poles’ of X(z)
3. The RoC of the Z-transform depends on the convergence of the polynomials P(z) and Q(z).
Question 6 |
For a periodic signal v(t)=30 sin 100t+10cos 300t +6 sin (500t + π /4), the fundamental frequency in rad/s
100 | |
300 | |
500 | |
None of the above |
Question 6 Explanation:
Given, the signal
V (t) = 3 0 sin 100t + 10 cos 300t + 6 sin (500t + π/4)
So, we have
ω 1 = 100 rads
ω 2 = 300 rads
ω 3 = 500 rads
∴ The respective time periods are
T 1 = 2π/ω1 = 2π/100 sec
T 2 = 2π/ω2 = 2π/300 sec
T 3 = 2π/ω3 = 2π/500 sec
So, the fundamental time period of the signal is
LCM (T 1 , T 2 , T 3 ) =LCM (2π,2π,2π)/HCF (100,300,500)
as T 0 =2π/100
∴ The fundamental frequency, ω0 =2π/T 0 = 100 rad/s
V (t) = 3 0 sin 100t + 10 cos 300t + 6 sin (500t + π/4)
So, we have
ω 1 = 100 rads
ω 2 = 300 rads
ω 3 = 500 rads
∴ The respective time periods are
T 1 = 2π/ω1 = 2π/100 sec
T 2 = 2π/ω2 = 2π/300 sec
T 3 = 2π/ω3 = 2π/500 sec
So, the fundamental time period of the signal is
LCM (T 1 , T 2 , T 3 ) =LCM (2π,2π,2π)/HCF (100,300,500)
as T 0 =2π/100
∴ The fundamental frequency, ω0 =2π/T 0 = 100 rad/s
Question 7 |
If the number of bits per sample in a PCM system is increased from a n to n+1, the improvement in signal to quantization noise ratio will be
3 dB | |
6 db | |
2n dB | |
n dB |
Question 7 Explanation:
(S/N q)dB
= (1.76 + 6 n) dB
(SQNR) 1 = 1 .76 + 6 n
(SQNR) 2 = 1 .76 + 6 n(n + 1 ) = 1 .76 + 6 n + 6
(SQNR) 2 − (SQNR) 1 = 1 .76 + 6 n + 6 − 1 .76 − 6 n = 6 dB
So for every one bit increase in bits per sample will result is 6 dB improvement in signal to quantization ratio.
= (1.76 + 6 n) dB
(SQNR) 1 = 1 .76 + 6 n
(SQNR) 2 = 1 .76 + 6 n(n + 1 ) = 1 .76 + 6 n + 6
(SQNR) 2 − (SQNR) 1 = 1 .76 + 6 n + 6 − 1 .76 − 6 n = 6 dB
So for every one bit increase in bits per sample will result is 6 dB improvement in signal to quantization ratio.
Question 8 |
At 100% modulation, the power in each sideband is__ of that of carrier.
50% | |
40% | |
60% | |
25% |
Question 8 Explanation:
Power in sidebands may be calculated as modulation index.
→ Each sideband is 25%. Total modulation index=1.
→ Each sideband is 25%. Total modulation index=1.
Question 9 |
Twelve 1 Ω resistances are used as edges to form a cube. The resistance between two diagonally opposite corners of the cube is
5/6 Ω | |
1/6 Ω | |
6/5 Ω | |
3/2 Ω |
Question 9 Explanation:
Apply Ohms law, the resistance is equal to the voltage divided by the current. The resulting equivalent resistance is 5/6 Ω.
R=E/I
R=(2*(1/2)V)/3A
= ⅚
Note: This is the cube structure consisting of 12 resistors electrically connected between the 8 vertices. Each resistor is 1 Ω, but any value can be used so long as they are all the same.
R=E/I
R=(2*(1/2)V)/3A
= ⅚
Note: This is the cube structure consisting of 12 resistors electrically connected between the 8 vertices. Each resistor is 1 Ω, but any value can be used so long as they are all the same.
Question 10 |
A solution for the differential equation x'(t) + 2x(t) = δ (t) with initial condition x(~0)=0
e -2t u(t) | |
e 2t u(t) | |
e -t u(t) | |
e t u(t) |
There are 10 questions to complete.