Process-Management
Question 1 |
Three concurrent processes X, Y, and Z execute three different code segments that access and update certain shared variables. Process X executes the P operation (i.e., wait) on semaphores a, b and c; process Y executes the P operation on semaphores b, c and d; process Z executes the P operation on semaphores c, d, and a before entering the respective code segments. After completing the execution of its code segment, each process invokes the V operation (i.e., signal) on its three semaphores. All semaphores are binary semaphores initialized to one. Which one of the following represents a deadlock-free order of invoking the P operations by the processes?
X: P(a)P(b)P(c) Y: P(b)P(c)P(d) Z: P(c)P(d)P(a) | |
X: P(b)P(a)P(c) Y: P(b)P(c)P(d) Z: P(a)P(c)P(d) | |
X: P(b)P(a)P(c) Y: P(c)P(b)P(d) Z: P(a)P(c)P(d) | |
X: P(a)P(b)P(c) Y: P(c)P(b)P(d) Z: P(c)P(d)P(a) |
Question 2 |
A shared variable x, initialized to zero, is operated on by four concurrent processes W, X, Y, Z as follows. Each of the processes W and X reads x from memory, increments by one, stores it to memory, and then terminates. Each of the processes Y and Z reads x from memory, decrements by two, stores it to memory, and then terminates. Each process before reading x invokes the P operation (i.e., wait) on a counting semaphore S and invokes the V operation (i.e., signal) on the semaphore S after storing x to memory. Semaphore S is initialized to two. What is the maximum possible value of x after all processes complete execution?
-2 | |
-1 | |
1 | |
2 |
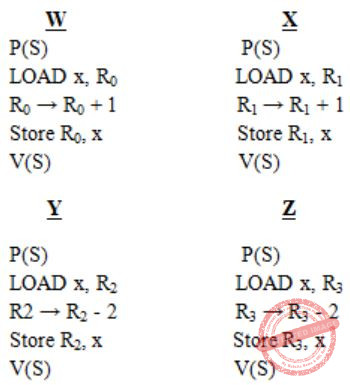
Suppose, 'W' executes first, and makes value of semaphore S=1. Now it increment value of x to 1 and comes out and make S=2. Now 'X' executes, where the value of x=1 is stored in R1 and then R1 is incremented and value in R1 is 2. Now 'X' gets preempted. Also to be noted that value of semaphore S is now '1' because the execution during process X got preempted and wasn't able to increase value of S to 2.
Now process Y will get completely execute and then Z will get completely execute. Now the value of 'x' is -3. Now again 'X' will get executed and the value stored in R1 i.e., '2' will get stored in 'x'. So the value in 'x' will be finally 2.
So the maximum possible value of 'x' is 2.